
Research interests
Computer Vision | Machine Learning | Deep learning | Image and video processing | Perception for robotics | Visual privacy
Most recent talk
Learning Privacy from Visual Entities
Presented at the international Privacy Enhancing Technologies Symposium (PETS 25) (16 July 2025)
News
| 2026/01/15 | Topical Collection on "Advancing Robotic Grasping and Manipulation for the Real-World" within Autonomous Robots now online link |
| 2025/12/15 | Collection proposal on "Advancing Robotic Grasping and Manipulation for the Real-World" (Guest Editor) accepted within the journal Autonomous Robots |
| 2025/11/5 | Accepted proposal for the "11th Robotic Grasping and Manipulation Competition" at ICRA 2026 (see webpage) |
| 2025/06/25 | Awarded the available and functional badges for the peer-reviewed artifact (source code) of our PoPETs paper (see github repo) |
Recent blog posts
Benchmarking via Competitions in
Robotic Grasping and Manipulation

Workshop organiser
Workshop @IROS25 - Call for Contributions
Autonomous Robotic Grasping and
Manipulation in Real-World Applications

Guest editor
IEEE RA-P Special Collection - Call for Papers
Awards
|
|

|

|

|
|
Outstanding Reviewer ECCV 2024 (top 3% of 7,293 reviewers) |
Outstanding Reviewer IEEE/CVF CVPR 2024 (top 2% of 9,872 reviewers) |
Outstanding Reviewer IEEE ICASSP 2023 |
Outstanding Reviewer IEEE ICASSP 2022 (31 reviewers selected) |
Top Reviewer IEEE ICIP 2020 (top 3% - 22 reviewers selected) |
Selected publications
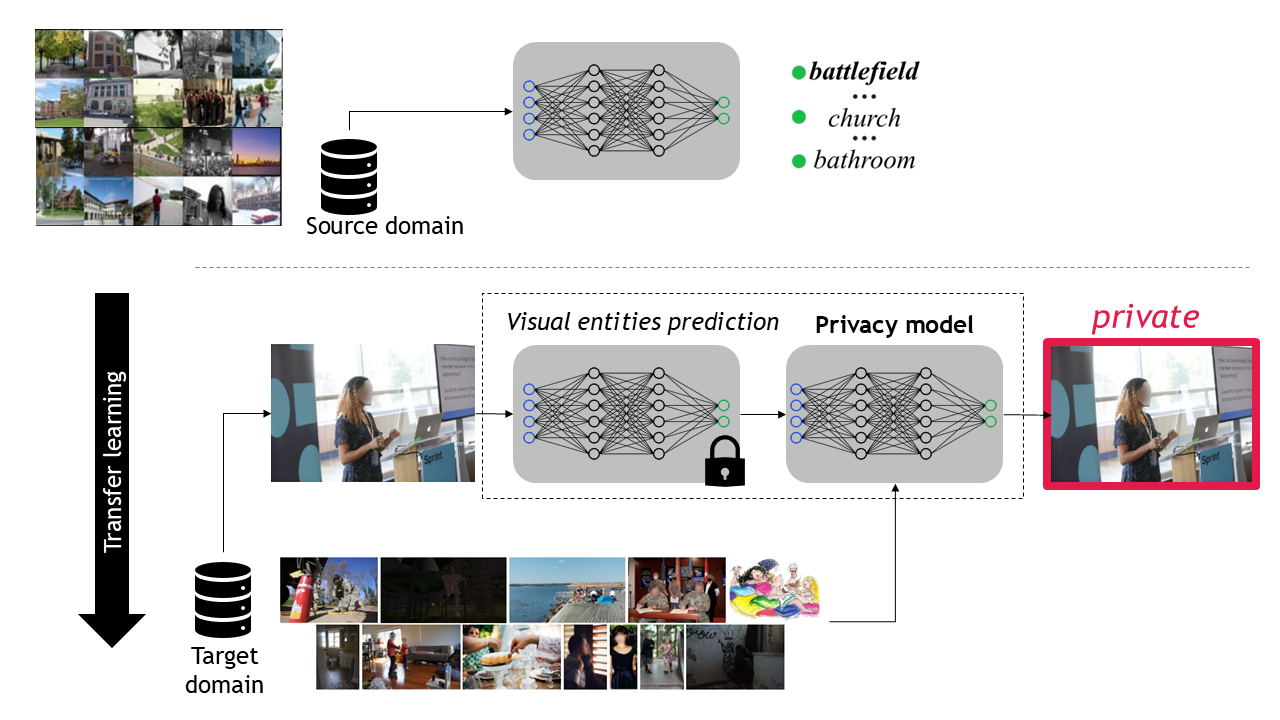
Learning Privacy from Visual Entities
Proceedings on Privacy Enhancing Technologies (PoPETs) 2025
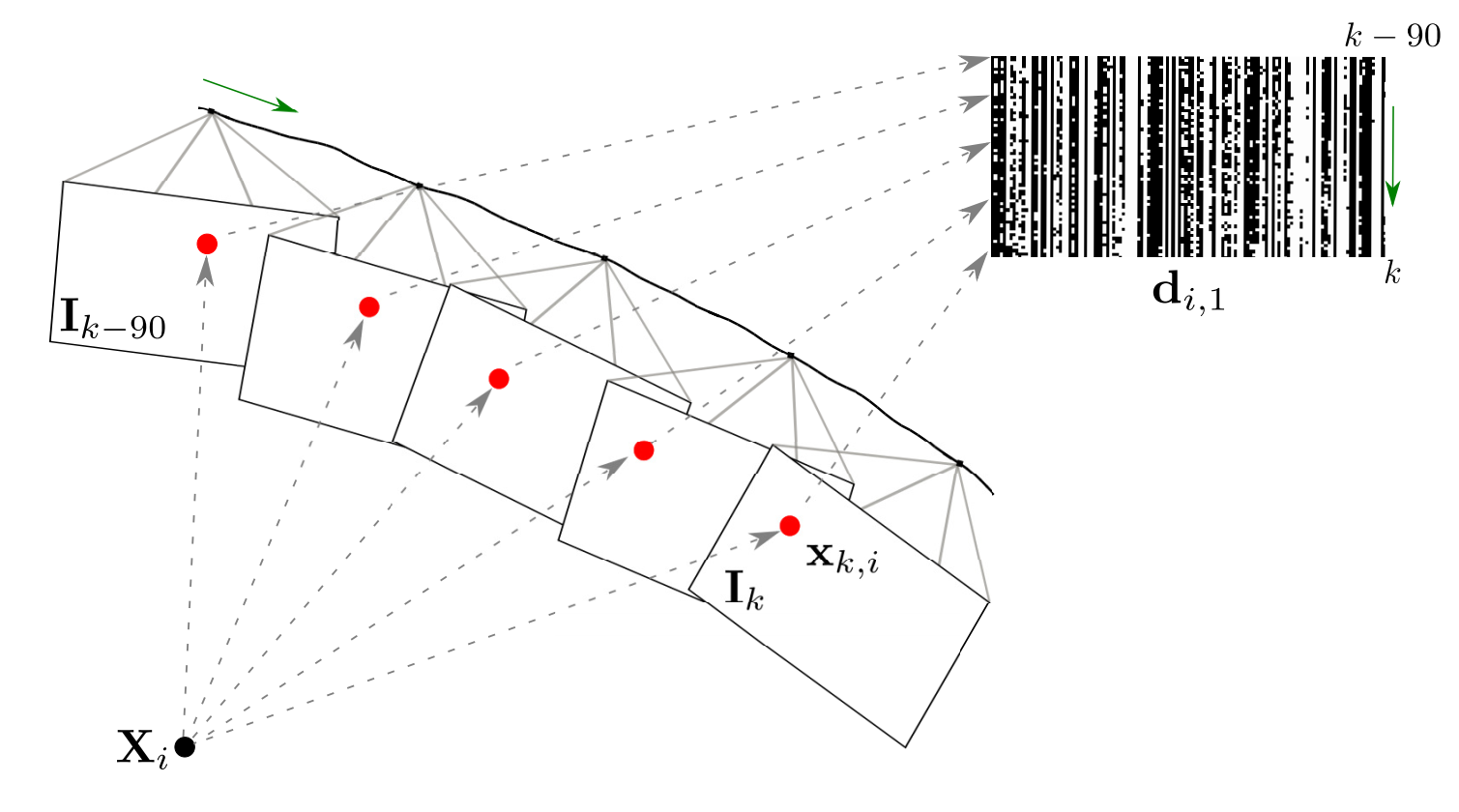
A spatio-temporal multi-scale binary descriptor
IEEE Transactions on Image Processing 2020

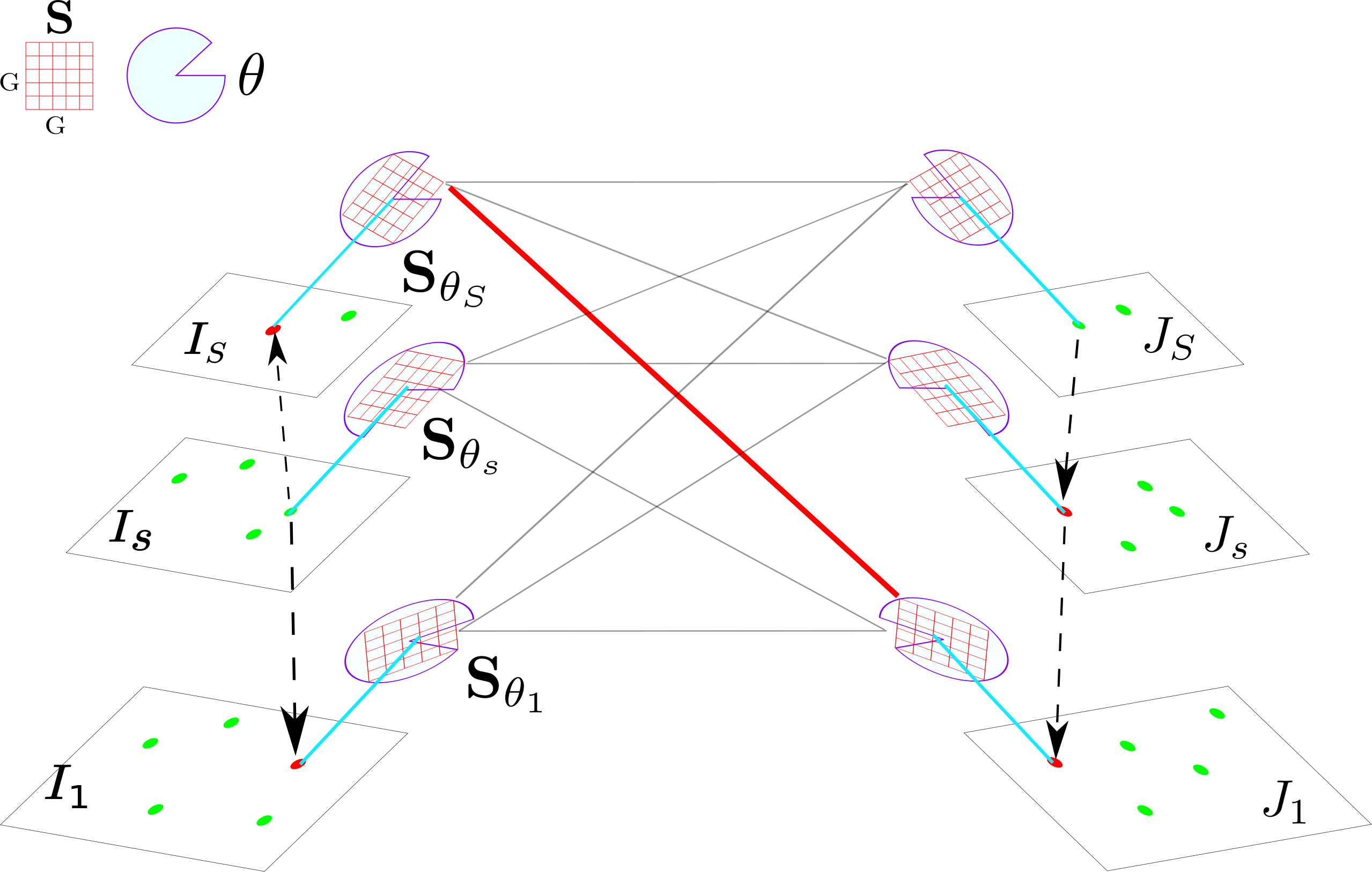
Cross-Camera View-Overlap Recognition
International Workshop on Smart Distributed Cameras at European Conference on Computer Vision, 2022
MORB: a multi-scale binary descriptor
IEEE International Conference on Image Processing 2018
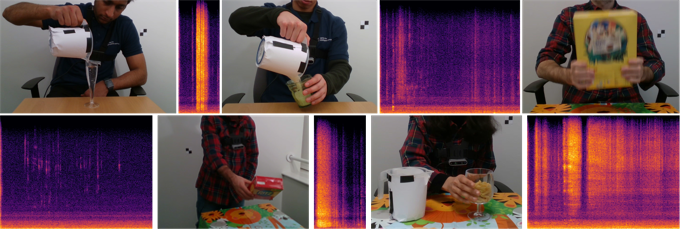
Audio-Visual Object Classification for Human-Robot Collaboration
IEEE International Conference on Acoustic, Speech and Signal Processing 2022
IEEE International Conference on Acoustic, Speech and Signal Processing 2022
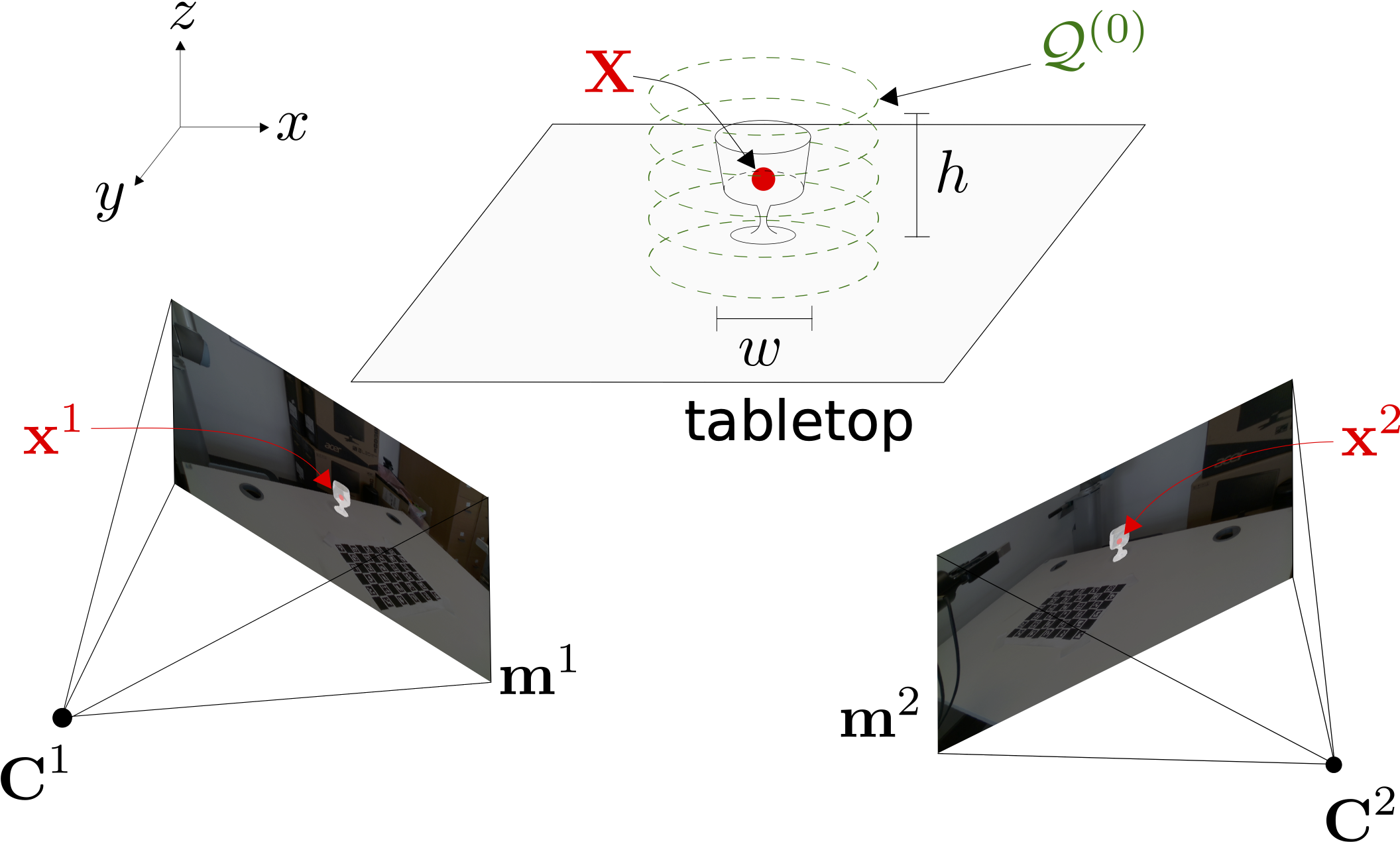
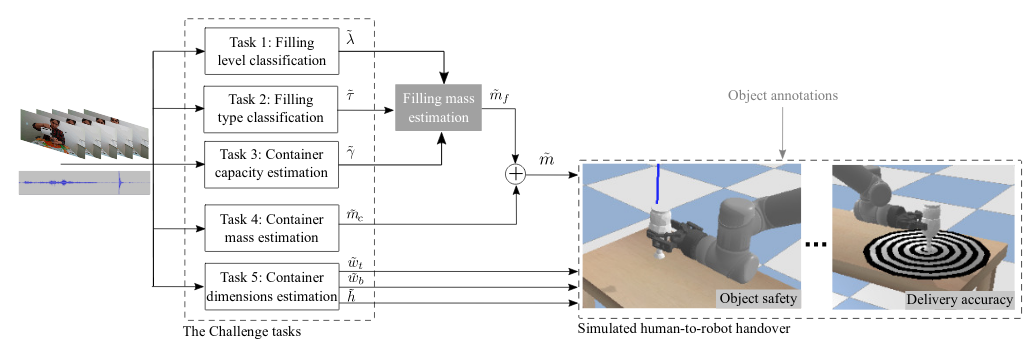
Multi-view shape estimation of transparent containers
IEEE International Conference on Acoustic, Speech and Signal Processing 2020
IEEE International Conference on Acoustic, Speech and Signal Processing 2020